Roadrunner might be the most versatile mid-sized robot we’ve seen this year. Robotics and AI Institute quietly unveiled the 15-kilogram prototype in IEEE Spectrum’s latest “Video Friday,” showing a biped that can skate like a rollerblader, step like a digitigrade runner, and even balance on a single wheel—all off one control policy.
What makes Roadrunner different
Most bipedal platforms pick a lane: legs for stepping or wheels for rolling. Roadrunner’s legs end in paired wheels that can snap between side-by-side and in-line configurations while the robot is in motion. Because each leg is fully symmetric, the robot can point its knees forward or backward to navigate clutter or squeeze through gaps. That geometry, paired with a reinforcement-learned controller, lets the robot:
- Transition between skating, in-line rolling, and true stepping without swapping hardware.
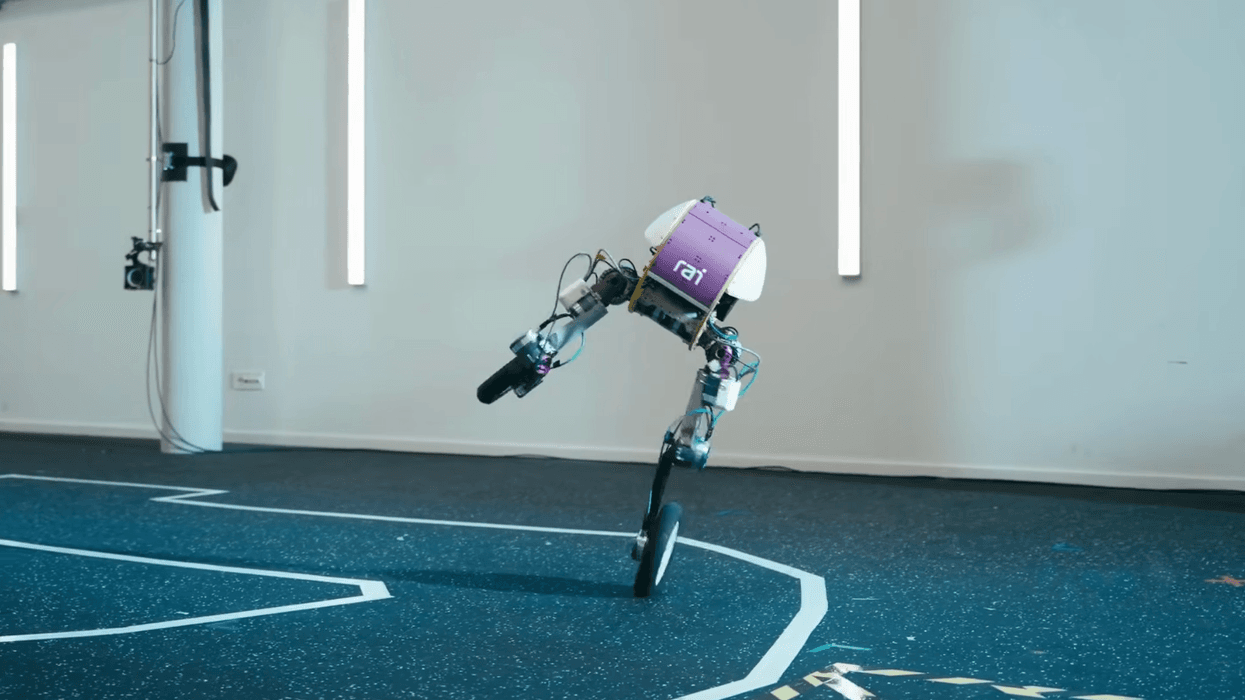
- Stand up from several fallen poses and recover balance zero-shot on the physical robot.
- Balance dynamically on a single wheel when narrow passages demand it.
Inside the control stack
The team trained a single multimodal policy rather than juggling separate behaviors for every gait. That matters for reliability: when the robot gets nudged or loses traction, it doesn’t need to decide which controller to hand off to—it simply keeps optimizing for stability. Successful zero-shot deployment suggests strong sim-to-real parity, which has been the Achilles’ heel for skating bipeds in the past.
Equally important is the robot’s ability to reconfigure its wheels mid-run. In “side-by-side” mode the base is wide, maximizing stability for acceleration or braking. Flip to “in-line” mode and Roadrunner can thread through doorways or pivot on a dime. The symmetric knees mean the controller can treat forward and backward motion almost identically, simplifying obstacle avoidance.
Why multimodal locomotion matters
Skates are efficient on smooth floors; feet are safer on stairs. Roadrunner’s promise is not raw speed but the ability to pick the right mode per meter. For logistics operators, that could mean a robot that cruises quickly down a factory aisle, then plants its wheels sideways for sure-footed footing on a ramp. For field teams, a backward-kneed configuration offers leg clearance when stepping over rubble.
Multimodal motion also future-proofs autonomy stacks. As perception improves, you want a platform that can exploit whatever terrain data you give it. Roadrunner can respond to a “low-friction ahead” warning by switching to stepping, then drop back into rolling when conditions stabilize—all automatically.
Where I’d aim it
- Last-10-meter delivery. Dense urban drop-offs need robots that can hop curbs, tackle ramps, and still roll efficiently on sidewalks.
- Inspection inside plants. Multimodal motion means fewer “no-go” zones inside chemical or energy facilities where stairs, gratings, and polished concrete coexist.
- Planetary scouting. The Mars Sample Return drama reminded everyone that redundancy matters. A rover-class platform that can skate over hardpan and step across rocks could backstop wheeled explorers.
- Entertainment and research. Lightweight, highly expressive gaits make Roadrunner a natural for lab demos, trade shows, or human-robot interaction experiments.
Operational checklist for teams
- Instrument the wheels. Multimodal drives need real-time feedback on slip so the controller knows when to swap modes.
- Dress the robot for impacts. The demo shows repeated stand-ups from awkward poses; adding sacrificial skins or bumpers will keep field units from scuffing sensors.
- Pair with semantic mapping. Let perception tag surfaces (tile, metal grate, gravel) so the planner can preemptively stage the right gait.
Open questions
- How well do those wheel modules survive abrasives like dust or chips?
- Can the symmetric leg design accommodate manipulators or payload bays without hurting balance?
- What happens when the robot needs to push or carry load—does the single policy generalize?
Even with those unknowns, Roadrunner points toward a more fluid class of legged robots that don’t have to choose between skating efficiency and stepping agility. Expect to see copycats: once you can treat legs as steerable linkages that end in wheels, every narrow corridor becomes fair game.
Source: “Video Friday: Beep! Beep! Roadrunner Bipedal Bot Breaks the Mold,” IEEE Spectrum, March 29, 2026.
